Generación de mapas de prescripción variable de nitrógeno utilizando imágenes de sensores remotos
Publicado: 4 de mayo de 2020
Por: Ricardo Melchiori; Melchiori, Arturo, Susana Albarenque; Alejandra C. Kemerer, Estación Experimental Agropecuaria Paraná del INTA, Oro Verde, Entre Ríos, Argentina
Introducción
La utilización de estrategias de manejo variable de fertilizantes ha sido tempranamente sugerida como una práctica que permite sincronizar la variabilidad de la oferta de nutrientes en el suelo con la demanda del cultivo en relación a su variabilidad espacial (Raun y Johnson, 1999). Así, la utilización de estas técnicas de Agricultura de Precisión contribuye a optimizar la productividad y minimizar el impacto ambiental (Pierce y Nowak, 1999; Bongiovanni y Lowenberg-DeBoer 2004).
El uso de herramientas de sensoramiento remoto ha permitido desarrollar algoritmos para la prescripción variable de nitrógeno (N). Al respecto, existen distintas aproximaciones y propuestas recientemente comparadas (Raun et al., 2017), las que en general utilizan índices de vegetación simples para diagnosticar el estado nitrogenado de las plantas, y a partir de esto proponer recomendaciones de fertilización. Aunque estas aproximaciones están disponibles, su utilización no demuestra resultados concluyentes en cuanto al beneficio económico (Scharf et al., 2011) dado que la respuesta a la fertilización en cultivos no solo depende de la capacidad de diagnosticar la deficiencia, sino también de las condiciones ambientales que afectan el rendimiento del cultivo y la respuesta a la fertilización.
Existen metodologías, como la desarrollada por Raun et al. (2005), que proponen no solo diagnosticar las necesidades de re-fertilización, sino además estimar la respuesta esperada y las dosis. En este sentido, este tipo de modelo fue utilizado y localmente se desarrollaron parámetros para su implementación en trigo (Melchiori et al., 2007) y maíz (Melchiori et al., 2006) en Argentina. Los resultados de su utilización han sido evaluados y demostrados a escala de experimentación en parcelas, así como también en pruebas realizadas a nivel de lotes comerciales con equipos montados en aplicadores autopropulsados (Melchiori et al., 2009). No obstante, debe señalarse que, aunque este tipo de equipos ha estado disponible en Argentina desde hace más de 10 años, la adopción del uso de los mismos para la prescripción variable de N en tiempo real no ha prosperado (Melchiori et al., 2013). Diversas cuestiones condicionan la adopción. Por un lado, puede considerarse el alto costo de los equipos, así como el largo tiempo de repago de la inversión dado el escaso retorno de este tipo de técnica, como sugieren Scharf et al. (2011) y Colaço y Bramley (2018). Por otro lado, la escasa magnitud de las dosis de fertilización utilizadas en Argentina que relativizan los efectos posibles de ganancia del manejo sitio específico por vía de la mejor eficiencia de uso del N.
En este contexto, resulta relevante generar herramientas conceptualmente sólidas, de resolución práctica y económica. En este sentido, en los últimos años se evidencia un rápido surgimiento de plataformas Web que permiten acceder a imágenes y al monitoreo remoto de cultivos (Melchiori et al., 2018). Asimismo, algunas de estas herramientas proponen alternativas para la generación de prescripciones de fertilización, aunque no se reportan ni se describen los métodos que se aplican. En algunos casos, las plataformas solo proponen alternativas para distribuir espacialmente los fertilizantes sin una estimación de la dosis de fertilización.
Trabajos recientes desarrollados por Melchiori et al. (2016) han considerado y propuesto la integración de las virtudes de las distintas metodologías de recomendación de N disponibles (Raun et al., 2005, 2011; Mullen et al., 2003; Johnson y Raun, 2003; Franzen et al., 2016; Holland y Schepers, 2013). Estos avances, junto con el manejo adecuado de los conceptos básicos de los métodos de diagnóstico de N, y su desarrollo sobre la base de plataformas que facilitan el acceso a imágenes satelitales de alta calidad, adecuada resolución espacial, y libre disponibilidad, generan amplias oportunidades para desarrollar e impulsar la adopción de herramientas para el manejo sitio específico de N.
En relación a lo planteado, en este trabajo se propone, desarrolla y demuestra el funcionamiento de un sistema de prescripción variable de N basado en el uso de imágenes de índices de vegetación. El procedimiento es aplicable a la información proveniente de satélites, aviones o sistemas no tripulados equipados con sensores multiespectrales. El objetivo de este trabajo es describir el sistema de prescripción variable en el cultivo de trigo.
Descripción de la propuesta
El sistema propuesto sintetiza el conocimiento adquirido y desarrollado en el uso de sensores remotos activos para el diagnóstico de fertilización nitrogenada en trigo y maíz por el equipo de Agricultura de Precisión de la EEA Paraná del INTA, junto con la consideración del estado del arte en la temática recientemente relevado por Franzen et al. (2016).
Modelos de recomendación
El modelo de recomendación empleado se basa en dos principios fundamentales, el primero que la demanda de N de un cultivo depende del rendimiento alcanzable (Meissinger et al., 1994; Raun et al., 2005), y el segundo que la respuesta a la fertilización es independiente del rendimiento (Raun et al., 2011). Numerosos estudios demuestran que tanto el rendimiento como el índice de respuesta pueden estimarse a partir de índices de vegetación obtenidos a media estación de crecimiento del cultivo (Franzen et al., 2016). Adicionalmente, se han logrado evidencias que demuestran que la predicción de la respuesta a la fertilización puede estimarse a partir de valores de índices de vegetación de referencia generados desde la variabilidad natural medida en lotes de producción como proponen Holland y Schepers (2013). De manera general, lo descripto permite desarrollar una propuesta principalmente basada en ideas de Raun et al. (2005), pero con ecuaciones ajustadas localmente (Melchiori et al., 2007), e integrando modificaciones desde Holland y Schepers (2013). Para esto, se desarrollaron experimentaciones en la EEA Paraná del INTA, desde 2004 al presente, que permitieron generar parámetros locales para las ecuaciones requeridas, así como información y criterios que permiten diferir las fertilizaciones a los estadios requeridos para la utilización de sensores, como el inicio de encañazón en trigo (1er y 2do nudo visible) y estadios de 8 a 12 hojas desplegadas en maíz.
Descripción del sistema de adquisición y procesamiento de imágenes
La libre disponibilidad de imágenes de sensores remotos satelitales de diferentes resoluciones espaciales y temporales a través de interfaces de comunicación maquina a máquina, permiten la automatización de los procesos de búsqueda y descarga de imágenes, facilitando el procesamiento de diferentes áreas de interés.
El Servicio Geológico de los Estados Unidos (USGS) publica una aplicación de programación de interfaces (API) para la comunicación con servidores de imágenes en diferentes resoluciones espaciales, temporales y espectrales (USGS EROS, 2018). El catálogo disponible en los servidores Earth Explorer o Glovis, está habilitado para la consulta y descarga en modo automático lo que permite disponer en tiempo real de datos de Landsat-8 OLI Colección 1 y algunos datos Sentinel-2A y 2B. Las imágenes Landsat-8 OLI tienen una resolución espacial de 30 metros y un período de revisita máximo de 16 días en cualquier lugar de la tierra (Roy et al., 2014). Del mismo modo, la Agencia Espacial Europea ESA pone a disponibilidad los datos de sensores de la constelación Sentinel-2 (Drusch et al., 2012; ESA Copernicus Open API, 2018). Las imágenes Sentinel-2 tienen resoluciones espaciales de 10, 20 y 60 metros dependiendo de la banda espectral en consideración con una resolución temporal de 5 días en cualquier lugar de la tierra (Gatti et al., 2018).
La consideración del uso combinado de los tres sensores, Landsat-8 OLI y los Sentinel-2 A y B, permite alcanzar una resolución temporal de 3 días, lo que permite disponer de una serie temporal relativamente densa de imágenes en la resolución espacio-temporal adecuada para el trabajo agronómico de monitoreo durante el crecimiento de los cultivos. Adicionalmente, ha sido demostrada la similitud entre las imágenes de ambas misiones lo cual habilita el uso combinado de las mismas para lograr los incrementos mencionados en la revisita (Li y Roy, 2017).
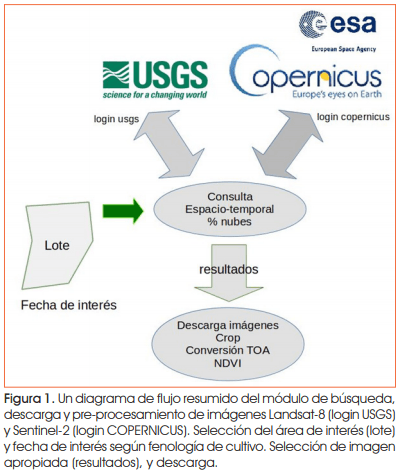
Tanto el USGS como la ESA permiten el acceso mediante el registro libre, aunque la descarga de imágenes de los servidores de USGS en forma autónoma, requiere de un permiso especial liberado por parte de los administradores del sistema. Ambas interfaces de comunicación con los servidores de imágenes, permiten al usuario indicar el área de interés y un período de fechas para la búsqueda de imágenes, además del nivel de cobertura de nubes admitido. De este modo, es posible seleccionar imágenes en forma óptima para alcanzar requisitos de proximidad temporal a la fecha de interés, para el monitoreo y la generación del mapa de prescripción (Figura 1).
En ambos casos se utilizan las imágenes en nivel de procesamiento L1. Esto es, datos de reflectancia de la imagen en tope de atmósfera o en el sensor (TOA), de las cuales se corta el área de interés. En base a estos datos es calculado el índice de vegetación NDVI con el objetivo de obtener el dato de entrada para el modelo de prescripción.
Requisitos de funcionamiento
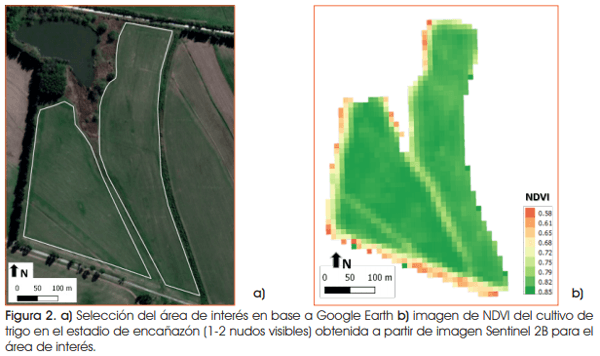
El sistema esta creado considerando que el usuario en una primera instancia selecciona el área de interés donde calcular la dosis de re-fertilización. Este procedimiento se realiza generando un polígono en formato KML o SHP a partir de la visualización del lote en cuestión sobre imágenes de Google Earth (Figura 2a). La selección del área de trabajo debe excluir zonas de interferencia en las imágenes como cañadas, árboles u otra vegetación que altere los valores de los índices de vegetación obtenidos en el cultivo de interés. Se debe especificar la fecha para la adquisición de las imágenes a utilizar como diagnóstico, esto es lo más cercano a los estadios sugeridos (i.e. fin de macollaje/ encañazón en trigo).
Respecto a los parámetros requeridos por el modelo de recomendación, el usuario debe especificar el rendimiento máximo alcanzable, esto es el rendimiento acorde al ambiente o lote en cuestión en condiciones de muy buena productividad. También se requiere especificar un valor de eficiencia de uso del N del fertilizante esperada, así como también especificar el % de N del fertilizante nitrogenado a utilizar para que el resultado se exprese directamente en kg de fertilizante ha-1.
Sistema de recomendación automatizado
El sistema desarrollado implementa los métodos para procesar las imágenes NDVI y generar el mapa de prescripción de fertilización nitrogenada correspondiente, considerando los requisitos de la maquinaria de aplicación disponible. Estos requisitos permiten obtener archivos de prescripción adecuados a las condiciones de trabajo de las máquinas de aplicación, como ser el ancho de trabajo del aplicador, tipo de fertilizante utilizado, número máximo de polígonos permitido por el controlador para variar la dosis de fertilizante y otras diferentes opciones de ajustes que puedan ser necesarias.
Resultados demostrativos del funcio- namiento del método
La funcionalidad del modelo de recomendación para el cálculo de dosis de re-fertilización para trigo se está testeando a nivel de pruebas realizadas en lotes de producción comercial. Hasta el presente, se han realizado pruebas preliminares en 2016/17 en un lote de la EEA Paraná y en un campo de producción en el Departamento Diamante. En la campaña 2017/18, se continuaron las pruebas de ajuste en lotes en Paraná y en un campo de producción en Nogoyá (Entre Ríos).
En este reporte se presentan los resultados obtenidos para un lote localizado en el predio de la EEA Paraná del INTA. Las pruebas de campo se realizan sobre un lote que se fertilizó al voleo previo a la siembra con una mezcla física de fertilizante (10-46-0-9) en una dosis de 150 kg ha-1. El trigo (Klein Liebre) fue sembrado el 14 de junio con una dosis de 140 kg de semilla ha-1, se fertilizó con N al voleo el 6 de julio con una dosis de urea de 100 kg ha-1 aplicada al estadio de 2-3 macollos, y se realizó el diagnóstico y re-fertilización variable con N aplicando el algoritmo propuesto, al estadio de 1-2 nudos visibles el 7 de septiembre. La aplicación del N en dosis variable se realizó con una fertilizadora de arrastre con distribución neumática Altina, modelo HP 3014, equipada con un equipo de dosificación variable Agrotax 9500 AGP.
Se seleccionó el lote a re-fertilizar a través de dos polígonos que se generaron en Google Earth de manera separada para evitar el área correspondiente a una cañada que atraviesa el lote, evitando de esta manera que genere interferencia por los valores de índices de vegetación en dicho sector (Figura 2a). De los servidores de imágenes, se obtuvo la más cercana al estadio de aplicación, en este caso se dispuso de una imagen Sentinel 2B 20HQK correspondiente a la fecha del 4 de septiembre de 2018. A partir de esta, se calculó el NDVI (Figura 2b), y se generaron las estimaciones requeridas para la recomendación de re-fertilización con N.
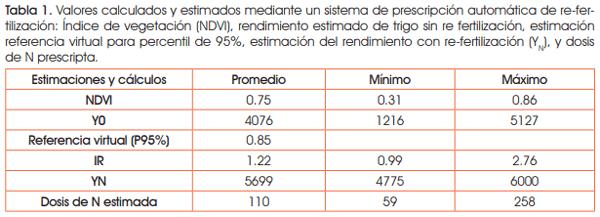
En general los valores de NDVI observados en el canopeo del cultivo fueron elevados, con un valor promedio para el lote de 0.75 (Tabla 1), los valores más bajos se observaron en el área correspondiente a la cañada que atraviesa el lote y en la zona de los bordes, valores que posteriormente fueron eliminados del mapa de prescripción.
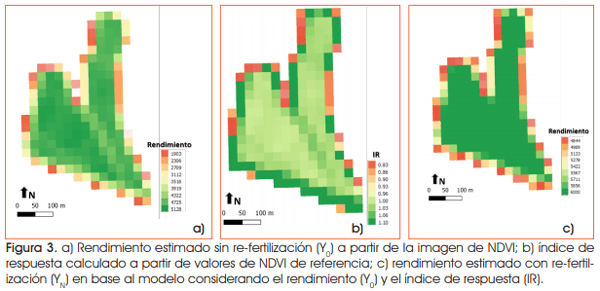
La imagen de NDVI fue re-muestreada a una resolución acorde a los requerimientos del ancho de trabajo de la fertilizadora, en este caso a un tamaño de píxel de 28 m (2 veces el ancho de labor). Se aplicó el modelo para la estimación del rendimiento a partir de la imagen de NDVI (Figura 3a). Dado que los valores de NDVI fueron en general elevados, el rendimiento estimado también mostró el mismo comportamiento, con un valor promedio para el lote de 4076 kg ha-1 y un máximo de 5127 kg ha-1 (Tabla 1).
El valor de NDVI de referencia determinado en el procedimiento fue de 0.85, considerándose este, como equivalente a una situación de crecimiento del cultivo sin limitación de rendimiento, como se reporta en la bibliografía. A partir de este valor, se calculó el índice de respuesta esperada a la fertilización (IR) para las condiciones observadas del cultivo (Figura 3b). El valor del IR osciló entre 0.99 y 2.75 (Tabla 1). El rendimiento medio estimado con re-fertilización fue de 5699 kg ha-1, con una gran proporción del lote donde se estimó que el rendimiento alcanzaría los valores máximos definidos (Figura 3c).
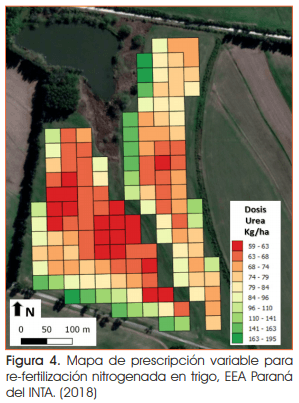
El modelo propuesto considera la información de rendimientos y respuesta estimada a la re-fertilización junto con la concentración de N en grano de trigo para estimar la dosis de N a aplicar. La dosis de aplicación se ajusta según una eficiencia de uso del N esperada en cada lote en particular, y la dosis expresada como kg ha-1 de fertilizante, se calcula en relación al % de N de la fuente de fertilizante utilizada. Por último, el sistema convierte la imagen (raster) a un vector de polígonos para ser empleado como archivo de prescripción (extensión SHP), utilizable en la generalidad de equipos de fertilización variable (Figura 4).
Los resultados obtenidos, demuestran la funcionalidad del sistema en un tiempo de procesamiento acorde a lo requerido para la toma de decisión de re-fertilizaciones en cultivos de trigo a media estación de crecimiento. Actualmente se está trabajando en la evaluación del funcionamiento del sistema en distintos ambientes, a la vez que se estudian factores que pueden contribuir a mejorar las prescripciones, como ser la consideración de imágenes de distinto origen y con distintos niveles de corrección. Asimismo, se están comparando diferentes ecuaciones disponibles para explorar el grado de ajuste de las estimaciones en ambientes de distinta productividad.
Por otra parte, se dispone también de procedimientos e información para las ecuaciones requeridas en la aplicación de este tipo de sistema en el cultivo de maíz, y otros cereales o cultivos industriales que requieran la utilización de fertilización nitrogenada (e.g. caña de azúcar). Los resultados de la implementación de esta propuesta, tienen como finalidad contribuir a un uso más eficiente y racional del N del fertilizante. Finalmente, se espera generar además la implementación de este modelo en distintas plataformas Web de gestión y administración de datos.
Agradecimientos
Al personal del Grupo de trabajo en Recursos Naturales y Factores Abióticos de la EEA Paraná, con quien se comparte el trabajo en el área experimental de la micro cuenca utilizada en la presente experiencia, y a la Asociación Cooperadora de la EEA Paraná del INTA que administra los lotes de producción comercial. Este trabajo fue parcialmente financiado con fondos del proyecto PNAIyAV-1130023: “Tecnologías de agricultura de precisión para mejorar la eficiencia de la producción agropecuaria” de INTA.
- Bongiovanni, R., &, Lowenberg-DeBoer J. 2004. Precision agriculture and sustainability. Precision agriculture, 5(4), 359-387.
- Colaço, A. F., & Bramley, R. G. V. 2018. Do crop sensors promote improved nitrogen management in grain crops? Field Crops Research, 218, 126-140.
- Drusch M., Del Bello U., Carlier S., Colin O., Fernandez V., Gascon F., Hoersch B., Isola C., Laberinti P., Martimort P., Meygret A., Spoto F., Sy O., Marchese F., Bargellini P. Sentinel-2: ESA’s Optical High-Resolution Mission for GMES Operational Services, Remote Sensing of Environment, Volume 120, 2012, Pages 25-36, ISSN 0034-4257, https://doi.org/10.1016/j.rse.2011.11.026
- ESA Copernicus Open API. https://scihub.copernicus. eu/twiki/do/view/SciHubWebPortal/APIHubDescription. Acceso en Mayo de 2018. Franzen, D., Kitchen, N., Holland, K., Schepers, J., & Raun, W. 2016. Algorithms for in-season nutrient management in cereals. Agronomy Journal, 108(5), 1775-1781.
- Gatti A., Gallopo A. Castellani C., Carriero F. Sentinel-2 Products Specification Document. (2018). Issue 14.5.
- Holland, K.H.; Schepers, J.S. 2013. Use of a virtual-reference concept to interpret active crop canopy sensor data. Precision Agriculture. 14(1), 71–85. DOI: 10.1007/ s11119-012-9301-6
- Johnson, G. V., & Raun, W. R. 2003. Nitrogen response index as a guide to fertilizer management. Journal of plant Nutrition, 26(2), 249-262.
- Li, J.; Roy, D.P. 2017. A Global Analysis of Sentinel-2A, Sentinel-2B and Landsat-8 Data Revisit Intervals and Implications for Terrestrial Monitoring. Remote Sensing. 9, 902.
- Meisinger, J.J. 1984. Evaluating plant-available nitrogen in soil crops system. In: Nitrogen in crop production. Hauck R.D. (Ed). Soil Science Society of America. USA Melchiori, R. J., Caviglia, O. P., Bianchini, A. A., Faccendini, N., & Raun, W. 2006. Use of Sensor Based Nitrogen Rates to Improve Maize Nitrogen Use Efficiency in the Northern Argentinean Pampas.
- Melchiori, R. J. M., Caviglia, O. P., Faccendini, N., & Albarenque, S. M. 2007. Utilización de sensores remotos para manejo de nitrógeno en trigo. EEA Paraná Serie de Extensión N 42. Actualización Técnica Cultivos de
- Melchiori, R.J.M.; Caviglia, O.P; & Albarenque, S.M. 2009. Manejo sitio-específico del nitrógeno en el cultivo de trigo basado en sensores remotos. En: Jornada Nacional de Agricultura de Precisión, integrando tecnologías para una agricultura sustentable. Eds: Melchiori, R.J.M.; Caviglia, O.P; & Albarenque, S.M.; & Kemerer, A.C. ISBN 978-987-1623-21-1
- Melchiori, R. J. M., Albarenque, S. M., & Kemerer, A. C. 2013. Uso, adopción y limitaciones de la agricultura de precisión en Argentina. Curso Int. Agric. Precisión, 12, 07.
- Melchiori, R.; Kemerer, A.; Casuccio, L.; Albarenque, S. 2016. Fotografías obtenidas por drones para la prescripción variable de nitrógeno en trigo. XVII Simposio Internacional en Percepción Remota y Sistemas de Información Geográfica SELPER.
- Melchiori, R. J. M., Albarenque, S. M., & Kemerer, A. C. 2018. Evolución y cambios en la adopción de la agricultura de precisión en argentina. Curso Int. Agric. Precisión, 17, 03.
- Mullen, R. W., Freeman, K. W., Raun, W. R., Johnson, G. V., Stone, M. L., & Solie, J. B. 2003. Identifying an in-season response index and the potential to increase wheat yield with nitrogen. Agronomy Journal, 95(2), 347-351.
- Pierce F. J. & Nowak, P. 1999. Aspects of precision agriculture. In: D. Spark (Ed) Advance in Agronomy 67, Academic Press. P 1-85.
- Raun, W. R., & Johnson, G. V. 1999. Improving nitrogen use efficiency for cereal production. Agronomy journal, 91(3), 357-363.
- Raun, W. R., Solie, J. B., Stone, M. L., Martin, K. L., Freeman, K. W., Mullen, R. W., ... & Johnson, G. V. 2005. Optical sensor based algorithm for crop nitrogen fertilization. Communications in Soil Science and Plant Analysis, 36(19-20), 2759-2781.
- Raun, W. R., Solie, J. B., & Stone, M. L. 2011. Independence of yield potential and crop nitrogen response. Precision Agriculture, 12(4), 508-518.
- Raun, W., Figueiredo, B., Dhillon, J., Fornah, A., Bushong, J., Zhang, H., & Taylor, R. 2017. Can yield goals be predicted? Agronomy Journal, 109(5), 2389-2395.
- Roy D.P., Wulder M.A., Loveland T.R., Woodcock C.E., Allen R.G., Anderson M.C., Helder D., Irons J.R., Johnson D.M., Kennedy R., Scambos T.A., Schaaf C.B., Schott J.R., Sheng Y., Vermote E.F., Belward A.S., Bindschadler R., Cohen W.B., Gao F., Hipple J.D., Hostert P., Huntington J., Justice C.O., Kilic A., Kovalskyy V., Lee Z.P., Lymburner L., Masek J.G., McCorkel J., Shuai Y., Trezza R., Vogelmann J., Wynne R.H., Zhu Z. 2014. Landsat-8: Science and product vision for terrestrial global change research, Remote Sensing of Environment, Volume 145, Pages 154-172, ISSN 0034-4257
- Scharf, P. C., Shannon, D. K., Palm, H. L., Sudduth, K. A., Drummond, S. T., Kitchen, N. R., ... & Oliveira, L. F. 2011. Sensor-based nitrogen applications out-performed producer-chosen rates for corn in on-farm demonstrations. Agronomy Journal, 103(6), 1683-1691.
Temas relacionados:
Autores:




Recomendar
Comentar
Compartir

¿Quieres comentar sobre otro tema? Crea una nueva publicación para dialogar con expertos de la comunidad.
Usuarios destacados en Agricultura

Miguel Ángel Taboada Instituto Nacional de Tecnología Agropecuaria - INTA
Investigación, director del Instituto de Suelos del INTA
Estados Unidos de América
Estados Unidos de América

Dr. Ramon León González  North Carolina State University - NCSU
North Carolina State University - NCSU
Investigación / Profesor asociado, biología y ecología de malezas
Estados Unidos de América
Estados Unidos de América




Prof. Luis Ávila  Mississippi State University
Mississippi State University
Profesor Asociado / Investigador
Estados Unidos de América
Estados Unidos de América