pérdida de cosecha
Reguladores automaticos de flujo en cosechadoras
Publicado: 27 de enero de 2011
Por: Ing. Agr. M.Sc. Mario Bragachini; Ing. Agr. Andrés Méndez; Ing. Agr. José Peiretti; Ing. Agr. Fernando Scaramuzza; Tec. Agr. Diego Villarroel; Ing. Agr. Juan Pablo Vélez; Ing. Agr. Federico Sánchez. INTA EEA Manfredi, Cordoba. Argentina
La siembra directa, el manejo integrado de plagas y malezas, la elección de materiales genéticos de alto potencial de rendimiento y una labor realizada con maquinaria altamente tecnificada hicieron posible llegar a los rendimientos obtenidos en la actualidad, donde según datos del MAGYP de la Nación, se lograron a nivel país en la campaña 2009/2010 una producción de 52.676.620 t. de soja, 22.676.920 t. de maíz, 7.494.263 t. de trigo y 3.629.000 t. de sorgo como los cultivos de mayor área sembrada.
No obstante, se observa un nivel de pérdidas que durante las últimas campañas ascienden en promedio país a valores de 120 kg/ha en soja, 214 kg/ha en maíz, 284 kg/ha en sorgo, 100 kg/ha en trigo y 126 kg/ha en cebada, sumado a las pérdidas en postcosecha. Estos valores que representan 1.263.858.425 U$S/añoquedeben ser disminuidos aumentando la eficiencia del proceso de cosecha, dado que reducir en un 20% esos valores significaría aumentar las exportaciones en 252.000.000 U$S/año, o lo que es lo mismo, el valor de 1000 cosechadoras que es el total de ventas del 2010. Para ello uno de los parámetros a tener muy en cuenta es la velocidad en la cosecha, la cual debe ser adecuada a las condiciones cambiantes del cultivo que esta siendo cosechado.
Uno de los principales parámetros de los cuales se dispone al momento de hablar de capacidad de trabajo de una cosechadora, es la cantidad de toneladas por hora de material cosechado que cada maquina tiene la capacidad de procesar. Cuando nos referimos a material cosechado, estamos hablando tanto de "grano" (G), como de lo que se denomina "material no grano" (MNG). Este MNG incluye todo lo que comúnmente se denomina como "paja" y "granza" y que dependiendo del cultivo que este cosechando, tendrá sus características propias (volumen de tallo, volumen de hoja, humedad, etc.). La relación entre cantidad de G y MNG de un determinado cultivo, es la "relación paja / grano" (RPG) es uno de los parámetros de cada especie cultivada que más modifican la capacidad de trabajo de una maquina cosechadora y sus regulaciones requeridas.
Desde el punto de vista de la maquina cosechadora, su capacidad de trabajo en t/h de material procesado esta determinada por las características propias de diseño y equipamiento de cada modelo que debe ser especificado por el fabricante. El tamaño del motor de cada maquina cosechadora, el tipo de sistema de trilla con la cual esta equipada (convencional, axial o mixto), el ancho de su cilindro de trilla, la superficie efectiva de su sistema de separación y limpieza, el tipo de transmisión de potencia disponible, su equipamiento general, etc., que junto con el mantenimiento de la máquina y estado del cultivo son los aspectos que van determinando este valor optimo de toneladas por hora de material cosechado.
Conociendo la capacidad de trabajo optima de material procesado de cada maquina cosechadora se puede manipular entonces su velocidad de avance, según el rendimiento del cultivo en cada sector del lote, la altura de corte y el ancho del cabezal, para que se mantenga trabajando alrededor de ese valor optimo en t/h de G y MNG procesado. Según se aleja de este valor óptimo de capacidad de procesamiento, hacia arriba como hacia abajo, se empieza a trabajar con mayor cantidad (kg/ha) de pérdidas por cola, además si se trabaja por debajo de los niveles óptimos no se aprovecha la capacidad operativa de la cosechadora.
Las tecnologías de Agricultura de Precisión, como es la generación de mapas de rendimiento, le han demostrado al usuario, que por más uniforme que se observe el cultivo a simple vista, existen amplias variabilidades de rendimiento entre sectores dentro del mismo lote y también de estructura y volumen de las plantas que están siendo cosechadas. Esto provoca que la máquina si cosecha a velocidad constante en determinadas zonas del lote trabaje por encima del su flujo óptimo y en otras por debajo, generando perdidas de granos y mal aprovechamiento de la capacidad operativa de la cosechadora.
Para afirmar lo dicho en el párrafo anterior se tomo un mapa de rendimiento sobre un lote de trigo con las prácticas de cosechas habituales que se implementan en nuestro país y se analizaron mediante figuras las variables flujo en función de la velocidad (Figura 1), y flujo en función del rendimiento (Figura 2). En la primera figura se observa que la máquina no mantiene un flujo constante de alimentación, sino que este es muy variable. A su vez, si se hace un análisis desde el parámetro velocidad, podemos observar que las distintas velocidades con las que se realizo la cosecha se corresponden con un rango muy amplio de flujo, o sea, que por ejemplo marchando a una velocidad de avance comprendida entre 8,5 y 9,5 km/h, el flujo de ingreso también varía en un rango muy amplio que va de 3 t/h a de 10 t en cultivo de trigo, con lo cual la cosechadora operó en ambientes de alto rendimiento con una velocidad similar a lo que lo hizo en ambientes de bajo potencial Estos datos se acentúan al observar en la figura 2 la pendiente que toma el mismo y la cual grafica como aumenta el flujo a medida que aumenta el rendimiento, y esto se debe, a que ante un aumento del rendimiento no se toma la precaución de disminuir la velocidad de avance y con lo cual se acentúan las perdidas.
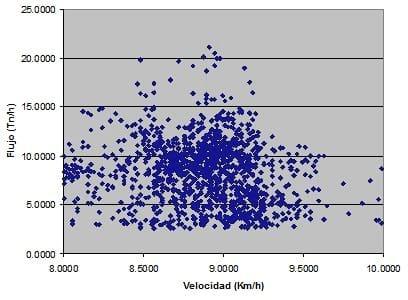
FIGURA 1: Flujo de cosecha (t/h) en función de la Velocidad de avance (km/h)
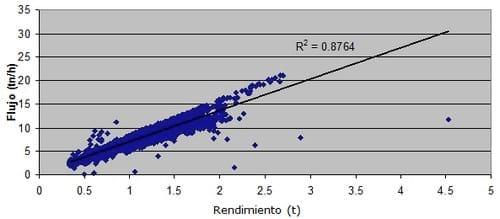
FIGURA 2: Flujo de cosecha (t/h) en función del Rendimiento (t.)
Si bien un operario capacitado y con experiencia, observando desde la cabina de la cosechadora, sabe detectar los cambios en el cultivo, para poder variar manualmente determinados parámetros de la maquina, como su velocidad de avance, la duración de la jornada y el cansancio hacen que la atención vaya disminuyendo según se acumulan las horas de trabajo.
Para solucionar esta fuente de perdidas, los modelos actuales de cosechadoras incluyen a los llamados SISTEMAS AUTOMATICOS REGULADORES O CONTROLADORES DE FLUJO (sistemas RF).
¿Qué son los sistemas reguladores de flujo?
El principio de funcionamiento de estos sistemas RF es variar la velocidad de avance de la cosechadora con el fin de mantener un flujo constante de material que ingresa en la máquina. Este sistema aumenta la productividad y eficiencia de la trilla en todos los cultivos, pero adquiere importancia en la cosecha de cultivos que representan el ingreso de gran volumen de material dentro de la máquina, como lo son los cereales de grano fino (trigo, cebada cervecera, arroz) que a su vez son implantados a menor distanciamiento entre hileras como por ejemplo 17, 19, 21, 23, 26cm., etc. (Figura 3)

FIGURA 3: la cosecha de trigo requiere el ingreso de gran cantidad de material dentro de la máquina.
Los sistemas RF, actúan de forma tal, que cuando disminuye el volumen de material, la velocidad de avance de la máquina aumenta, realizando el control inverso cuando este volumen aumenta (Figura 4). Por ejemplo, el sistema Harvest Smart, que es como denomina al regulador de flujo John Deere, comienza a reducir la velocidad de la cosechadora cuando el régimen del motor se reduce por debajo de 2170 r/min. A su vez, este sistema RF, permite la opción de adecuar la velocidad a que se mueve la cosechadora hasta alcanzar sus límites de capacidad (en el modo "Capacidad"), o bien sus límites de pérdidas (en el modo "Smart"), y al igual que en los demás sistemas, en todo momento, el operador puede limitar la velocidad máxima de avance.

FIGURA 4: Explicación gráfica de cómo varía la velocidad en función del flujo de cultivo utilizando un sistema RF (Claas, 2009).
Los sistemas RF utilizan en el equipo parámetros diferentes y en forma simultánea para el control, los cuales toman a partir de distintos sensores instalados en la máquina (Figura 5). Estos parámetros son la velocidad de avance, el volumen de material en la noria de grano limpio, la carga del motor y las pérdidas de grano. El sistema toma todos los parámetros necesarios en forma simultánea y actúa en consecuencia, aumentando o disminuyendo la velocidad de avance de la maquina, manteniendo el flujo de alimentación lo más uniformemente posible frente a las variaciones del rendimiento del cultivo.

FIGURA 5: Componentes del sistema Harvest Smart (John Deere, 2009).
Otro sistema RF es el Cruise Pilot de Claas, el cual se define proactivo, dado que mide la altura de la cadena en el acarreador, donde define el flujo de material instantáneo de alimentación, al mismo tiempo que determina la carga del motor y adapta inmediatamente como consecuencia la velocidad de avance a las condiciones actuales en tiempo real. Con esto se logra que el sistema actúe de manera previsora, siendo capaz de reaccionar a las sobrecargas que se produzcan sobre los órganos de trabajo de la máquina, evitando pérdidas de grano por sobrecarga o desaprovechamiento de la capacidad de la cosechadora.
La empresa Agco, denomina Control de Crucero a su RF, y explica su funcionamiento a través de un sensor de carga en el cilindro de trilla (transmisión hidráulica), mediante el cual la máquina compara la carga momentánea permanentemente, y la establecida en el cilindro previamente como máximo. A su vez, un actuador eléctrico ligado a la bomba hidrostática recibe el comando del computador y hace variar la velocidad de la máquina, manteniendo el cilindro de trilla siempre con la misma carga, de forma automática.
Es importante aclarar que estos dispositivos que conforman los sistemas RF pueden no funcionar a pleno rendimiento en ciertas circunstancias como trabajos en laderas muy inclinadas, cultivos muy volcados, abundancia de barro, entre otras.
¿Cómo utilizar los sistemas reguladores de flujo?
Los sistemas RF deben ser calibrado para cada cultivo y cuando varían las condiciones de trabajo. Para ello es necesario trabajar con la máquina en una zona de rendimiento promedio, con los niveles de pérdidas deseados, manteniendo dicho nivel durante 10-15 segundos para que la máquina se estabilice. De este modo se ajusta el volumen de paso del material y los niveles de pérdidas deseados en el sistema.
Al realizar la calibración, hay que determinar en el sistema la velocidad máxima en que permanecerá operativo el control del flujo. El sistema no superará esta velocidad de avance, con independencia del volumen del cultivo.
Otro punto que se puede modificar son las RPM del motor. Este parámetro se puede utilizar para ajustar el régimen mínimo de RPM del motor admitido por el sistema, dado que si el ingreso de material resulta problemático, se produce un auto-ajuste para permitir más margen para la carga del motor. El régimen del motor también permite controlar la velocidad del avance, en función del material ingresado en el sistema de trilla, ajustándose a un valor próximo al régimen de trabajo normal de cosecha. Esto puede realizarse en cultivos donde la carga del cabezal es relativamente importante con respecto a la carga de la trilla, como al cosechar maíz.
Estos sistemas de regulación de flujo pueden ser interrumpidos en forma opcional por el operario de la cosechadora durante la descarga de la tolva en movimiento. De esa forma se logra recuperar el mando de la máquina mientras se realiza la descarga, controlando de manera manual de la velocidad de avance. Por ejemplo, el sistema Harvest Smart de John Deere, comandará la velocidad de trabajo de la cosechadora cuando se activa el sinfín de descarga y no se desplace la palanca multifunción hacia atrás. Una vez que se desplace la palanca multifunción hacia atrás, el sistema queda desactivado temporalmente.
El monitor de rendimiento y su papel en el control de flujo
En el caso de que la máquina cosechadora no disponga de un sistema específico RF y su vez disponga de un monitor de rendimiento, existe una alternativa para aumentar la eficiencia de cosecha y mantener constante a lo largo del lote el flujo de material que ingresa por el embocador. Esta opción consiste en ir regulando la velocidad de la máquina en forma manual en función del flujo (t/h) que va indicando el monitor de rendimiento (Figura 4). Este parámetro expresa la cantidad de toneladas por hora de material cosechado que la máquina está procesando. En base a esto, los niveles de pérdida por cola pueden ser disminuidos controlando la velocidad de avance de la cosechadora según el rendimiento registrado por el monitor en cada ambiente dentro de un lote (Bragachini y col., 2007), y de esta forma aumentar la velocidad de avance en las zonas de menor caudal y disminuirla en las de mayor ingreso de material.
El monitor de rendimiento nos permite comparar la performance de la cosechadora en diferentes regimenes de trabajo. Esto se ve representado en la figura numero 6 en donde se visualiza una fracción de un mapa de rendimiento el cual pertenece a un ensayo de diferentes velocidades de cosecha, observándose por medio de un contraste de colores, una clara disminución de rendimiento en promedio ante el incremento de la velocidad de operación. Este incremento de pérdidas es de 100kg/ha cuando se pasa de 6km/h a 7 km/h y de 562kg/ha cuando pasa de 7km/h a 8 km/h, el cual representa en términos de porcentajes el 14,51% del rendimiento.
En base a este último concepto mencionado, es importante mencionar un trabajo realizado por los Proyectos Agricultura de Precisión y Precop II, en el cual se tuvo como objetivoanalizar el comportamiento y la capacidad de trabajo de la cosechadora Don Roque 125 (Clase 4), equipada con monitor de rendimiento nacional IGB Exactagro 128a, ante diferentes velocidades de avance, diferentes caudales de cosecha y diferentes condiciones del cultivo.
En este ensayo realizado el establecimiento "El Rincón", localidad de Tres Arroyo, Prov. Bs. As., en diciembre de 2008, se presentó una situación de cosecha con tres ambientes bien definidos que a simple vista y a campo pueden diferenciarse, lo cual hace que la velocidad de avance de la cosechadora deba ser distinta según los diferentes potenciales de cada zona. Corroborando esto se puede apreciar el mapa de rendimiento y diferenciar claramente los ambientes observados a campo (Figura 7).
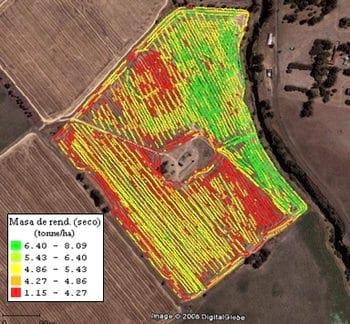
FIGURA 7: Mapa de rendimiento.
En función de lo observado en el mapa de rendimiento se logra apreciar que la cosechadora debió disminuir la velocidad cuando se encontraba en ambientes que superaban los 5 t/ha y en las zonas donde el rendimiento era relativamente menor, la velocidad podía exceder los 4 km/h sin registrar ningún tipo de pérdida (dentro de los parámetros de tolerancia) en lo cosechado. Recordemos que el limite aconsejable para este tipo de cultivos no superar las 18 t/h para trabajar en un régimen de cosecha adecuado, según los parámetros de una cosechadora clase 4 como la utilizada.
Podemos observar también con claridad (Figura 7) que en la zona de mayor profundidad de suelo, los rendimientos estuvieron promediando los 6 t/ha, llegando a picos de 8 t/ha y en este caso la velocidad de cosecha fue de 4 Km./h en promedio, trabajando con un caudal de 17.2 t/h, para mantener las perdidas por debajo de la tolerancia.
En el ambiente de medio potencial el rendimiento se registro en un promedio de 5.3 t/ha y en la zona de bajo potencial se obtuvieron rendimientos de 4.5 t/ha. El caudal y la velocidad de cosecha en estos dos ambientes, para mantener las perdidas por debajo de la tolerancia, pueden apreciarse en la Tabla 1.
Tabla 1: Rendimiento, velocidad y caudal. Aclaración: el ancho real de ingreso de grano teniendo en cuenta de la plataforma fue de 6,8 m.
Potencial | Rendimiento t/ha | Velocidad km/h | Caudal t/h |
Alto | 6.3 | 4 | 17.2 |
Medio | 5.3 | 4.6 | 16.6 |
Bajo | 4.5 | 5.2 | 16 |

FIGURA 8: a) Mapa de velocidad (km/h); b) caudal (kg/h).
La productividad de este lote hizo que la cosechadora debiera respetar las velocidades de cosecha estimadas para no generar pérdidas. Debido a esto se aprecia claramente que a una velocidad controlada el mapa de rendimiento (t/ha) presenta zonas diferenciadas que se superponen con las zonas del mapa de caudal (kg/h ó t/h) (Figura 7 y 8).
Caso contrario veríamos que las zonas de bajo rendimiento serían a causa de una velocidad incorrecta con la consecuente pérdida, pero en esta ocasión tenemos que la baja velocidad de avance se tradujo en altos rendimientos y la velocidad elevada, se utilizo en zonas de bajo caudal, lo cual expresó rendimientos acordes al ambiente y sin registrar pérdidas sobre el lote.
Estos sistemas RF están ideados y diseñados para ayudar al operario a realizar la cosecha con mayor eficacia y eficiencia, dado que disminuyen las perdidas en zonas de gran flujo y también permite avanzar a mayor velocidad en condiciones de cultivo que así lo permiten. El maquinista sigue siendo responsable de guiar la máquina y debe continuar prestando atención al entorno durante su operación. El objetivo de estos dispositivos es permitir que la cosechadora trabaje siempre a un régimen adecuado, protegiendo cada uno de sus componentes al evitar que trabaje con sobrecarga en los ambientes de gran volumen de material. Recuerde siempre que las regulaciones más efectivas son las realizadas por los operarios capacitados encargados de conducir al equipo de cosecha.
Está claro que en las cosechadoras modernas el RF será una herramienta útil para lograr un mayor aprovechamiento de la máquina y también para evitar perdidas de granos por trilla, separación y limpieza. También es importante aclarar que este equipamiento de velocidad variable y flujo constante es muy útil para cosechar cultivos como trigo, cebada, sorgo granífero, entre otros, pero tiene menos utilidad para el caso de maíz y girasol, y muy poco cuando se trata de soja, ya que la velocidad de trabajo y las pérdidas están definidas por el cabezal (70% de las perdidas), y los sensores de RF no actúan sobre el cabezal, sino en la alimentación de trilla, separación y limpieza.
BIBILIOGRAFIA
- Bragachini, M.; Peiretti, J. 2007. Logros del PRECOP. Aumento de la eficiencia de cosecha de Trigo. Actualización Técnica Nº 46. Ediciones INTA. Proyecto Eficiencia de Cosecha y Postcosecha de Granos. EEA Manfredi, Córdoba, Argentina, 36 pp.
- Bragachini, M.; Giordano, J.; Peiretti, J. 2007. Ensayo de performance en cosecha de Trigo (Triticum aestivum L.) con cosechadoras Don Roque 125 M y Vassalli 1550 E. Proyecto Eficiencia de Cosecha y Poscosecha de Granos. EEA Manfredi, Córdoba, Argentina.
- Bragachini, M.; Méndez, A.; Scaramuzza, F.; Vélez, J.; Villarroel, D. Monitoreo de rendimiento y caudal en cebada en el partido de Tres Arroyos, Provincia de Buenos Aires. Proyecto Agricultura de Precisión.EEA Manfredi, Córdoba, Argentina.
- Claas. 2010. Cruise pilot. Consultado el 09/11/2010
- Claas. 2010. Cruise pilot. Consultado el 09/11/2010
- John Deere. 2010. Harvest Smart. Consultado el 09/11/2010
- Ministerio de Agricultura, Ganadería y Pesca. 2010. Agricultura Producción, área sembrada y cosechada, cotizaciones nacionales e internacionales. Consultado el 09/11/2010
Contenido del evento:
Temas relacionados:
Autores:

Instituto Nacional de Tecnología Agropecuaria - INTA

Instituto Nacional de Tecnología Agropecuaria - INTA

Instituto Nacional de Tecnología Agropecuaria - INTA

Mostrar más
Recomendar
Comentar
Compartir

21 de febrero de 2011
Los felicito por su información. Me gustaría conocer acerca de cosechadoras pequeñas para quinoa.
Recomendar
Responder

Agrytec
28 de enero de 2011
Me gustaría contactarme con los profesionales que escribieron estos articulos técnicos sobre cosechadoras ¿Dónde puedo tener sus correos electrónicos?
Gracias
Recomendar
Responder
¿Quieres comentar sobre otro tema? Crea una nueva publicación para dialogar con expertos de la comunidad.