Principios Básicos de Ultrasonografía Veterinaria
Publicado: 27 de diciembre de 2013
Por: Carlos Andrés Giraldo Echeverri (Universidad de Antioquia, Grupo de Fisiología y Biotecnología de la Reproducción, Reproducción, Biogénesis). Colombia
INTRODUCCIÓN
La tecnología del ultrasonido nace en 1880 con el desarrollo de los efectos piezoeléctricos. Luego fue aplicada en forma de SONAR (Sound Navigation andRanging) durante la segunda guerra mundial para la detección de barcos, submarinos y aviones de guerra. La emisión de las ondas de ultrasonido se obtiene por medio de cristales que son sometidos a una corriente eléctrica logrando que vibren, la recepción de éstas ondas se logra cuando retornan de nuevo a los cristales al chocar con los tejidos. Estos cristales están contenidos en dispositivos llamados transductores o sondas ecográficas conectadas a un monitor. (Perkings 2000, Ginther et al. 1989)
Desde 1950, la ecografía, ultrasonografía o scanning está siendo utilizada por muchos veterinarios en ganadería, posteriormente se comenzó a aplicar en otras especies en el diagnóstico clínico, reproductivo e investigación (Palmer y Driancourt 1980, Kassam et al. 1987, Taverne y Willemse 1989).
Los primeros ecógrafos fueron llamados «Modo A», el cual mostraba los ecos ultrasonográficos que retornaban de los tejidos como picos en la pantalla del equipo, donde la distancia entre estos estaba relacionada con la distancia de las interfaces sucesivas que atravesaban las ondas. La altura de cada pico correspondía a la amplitud del sonido en la profundidad del tejido. El Modo A se aplicaba para medir la profundidad de la grasa muscular. En 1968 el formato del Modo A fue modificado y fue llamado «Modo B». El Modo B es mostrado como una imagen bidimensional y consiste en una serie depuntos en la pantalla. El brillo de cada punto es determinado por la amplitud o fuerza de cada eco que regresa de su paso por los tejidos, mientras el tiempo que toma el eco en reflejarse al transductor determina la posición o localización del punto en la pantalla.
La versión actual es llamada «Tiempo Real» y es una versión perfeccionada del Modo B, donde se crean imágenes que son visualizadas casi instantáneamente interpretando el movimiento de los tejidos vivos (Perkins 2000, Boyd et al. 1988, Boyd et al. 1990, Chaffaux et al. 1982). En 1984, se comenzó a utilizar en yeguas, y más tarde en vacas, utilizando en ambas la vía transrectal, como una herramienta importante en el manejo, diagnóstico y tratamiento de los procesos reproductivos (Pierson y Ginther 1984). Luego, gracias al desarrollo de su tecnología, se fue popularizando su uso en éstas especies, así como en cerdas, ovejas y cabras, y hoy es un elemento diagnóstico de gran ayuda en muchos animales domésticos, e incluso en la fauna silvestre, así como en técnicas muy especializadas como la colecta transvaginal de ovocitos (Ovum Pick-Up) y el sexado fetal. Igualmente, es una técnica muy útil en investigación en el área de reproducción animal (Ballenda 2003, Kassam et al. 1987, Taverne y Willemse 1989, Reinders y Van Giessen 1993).
Básicamente, el ecógrafo necesario para el trabajo veterinario es en modo B y a tiempo real, ya que el movimiento de las estructuras ayuda a la identificación del tejido y, por extensión, se puede estudiar tanto la estructura como su función. El modo M permite explorar los movimientos de los tejidos, en especial el corazón en ecocardiografía, mediante la creación de una imagen unidimensional representada en un eje vertical respecto al tiempo en el eje horizontal. La ecografía Doppler es utilizada para estudios hemodinámicos y de gestación, especialmente en cerdos, ya que registra el aumento o la disminución de la frecuencia producida por estructuras en movimiento, según se acerquen o se alejen, respectivamente. Para la ecografía Doppler el registro de la señal ecográfica se puede hacer por medio de la emisión de sonidos, o un sistema dúplex (pantalla bidimensional y a tiempo real).
Algunos equipos actuales poseen un software especial para realizar cálculos y conversiones (como en los utilizados en la medición de canales cárnicas), y otros anexos como impresoras, cámaras fotográficas o dispositivos de video. También existe la posibilidad de analizar el contraste de los tejidos por medio de la ecografía con flujo de color (Goddard 2000).
ULTRASONIDO
El ultrasonido son ondas de sonido de alta frecuencia las cuales no son audibles por el hombre. Los sonidos audibles están entre 20 – 20 000 herzios (Hz, o ciclos por segundo), y los ultrasonidos diagnósticos están entre 1 – 10 MHz (Goddard 2000), ninguno se propaga en el vacío y en medio gaseoso la transmisión es pobre. Cuando las ondas chocan con un tejido, un líquido o un gas, algunas son absorbidas y otras se reflejan en forma de ecos que son captados por el equipo para ser interpretados en forma de imágenes.
Impedancia acústica: Es el producto de la velocidad del sonido en una sustancia y la densidad de la misma (Goddard 2000). La diferencia en la impedancia acústica de los diferentes tejidos determinan la cantidad de ondas que se reflejan y la fuerza con que son captadas de regreso, o sea, la intensidad de brillo de los puntos de la imagen ecográfica.
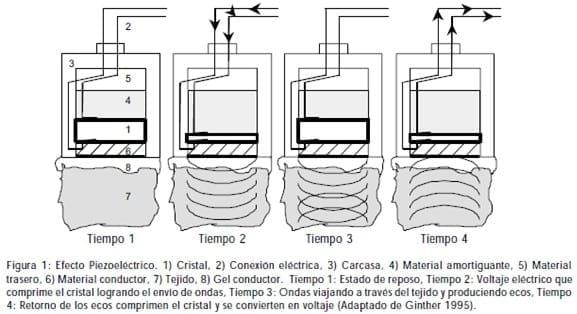
Efecto piezoeléctrico: La aplicación de una corriente de alto voltaje en la cara posterior de algunos cristales (naturales o producidos artificialmente) hace que se deformen produciendo una vibración. La magnitud de ésta deformación, y por lo tanto de la frecuencia de vibración, es proporcional al voltaje aplicado y se traduce como la fuerza de la onda ultrasónica. A todos los cristales no se les aplica el voltaje al mismo tiempo (Figura 1), sino por segmentos lineales, para mejorar la calidad de la onda (Goddard 2000, Kahn 1990). Las ondas ultrasónicas, al regresar de su paso por los tejidos, chocan con la cara anterior de los cristales y de nuevo los deforman)(Figura 1), transformando ésta energía mecánica en una señal eléctrica (voltaje) proporcional a la intensidad (o fuerza) del eco reflejado (Goddard 2000).
La frecuencia en que son emitidas y la longitud de las ondas, son inversamente proporcionales. A medida que aumenta la frecuencia de emisión, la capacidad de diferenciar objetos a lo largo del camino recorrido por la onda (resolución axial) aumenta, pero la onda se atenúa más rápido (disminuye su fuerza)( Goddard 2000). La frecuencia depende de la profundidad de penetración (frecuencia baja), como por ejemplo, en la evaluación del músculo dorsal largo de las canales bovinas (frecuencia de 3,5 MHz); y de la necesidad de resolución (frecuencia alta) como en la evaluación reproductiva (frecuencia de 7,5 MHz) (Perkins 2000). La velocidad de propagación es independiente de la frecuencia, pero dependiente de las características tisulares, debido a la diferencias en sus densidades (Goddard 2000).
El ultrasonido es emitido por el transductor de las siguientes formas:
1. Para diagnósticos en modo B se utiliza un sistema de ecos pulsados, donde se emite un pulso con 5-6 ciclos de ondas en menos de un microsegundo, y sus reflexiones se reciben antes de que se emita el siguiente pulso, lo cual permite interpretar las señales en imágenes.
2. Para ecografía Doopler pulsada se utilizan 50- 20 ciclos por 2 microsegundos, aunque existen sistemas Doopler y terapéuticos de emisión continua.
3. Para ecografía terapéutica la duración del pulso es alrededor de 0,2 milisegundos hasta el tiempo de inactividad. La frecuencia de emisión del pulso se rige por la velocidad del ultrasonido en el tejido (aproximadamente 1400 m/s-1; equivalente a 6,5 microsegundos/cm-1) y por el tiempo total que necesita para recorrer la distancia de ida y regreso
4. Para ecografía en tiempo real se utiliza frecuencias hasta de 2000 Hz con pulsos de alta calidad y de frecuencia uniforme (Goddard 2000).
2. Para ecografía Doopler pulsada se utilizan 50- 20 ciclos por 2 microsegundos, aunque existen sistemas Doopler y terapéuticos de emisión continua.
3. Para ecografía terapéutica la duración del pulso es alrededor de 0,2 milisegundos hasta el tiempo de inactividad. La frecuencia de emisión del pulso se rige por la velocidad del ultrasonido en el tejido (aproximadamente 1400 m/s-1; equivalente a 6,5 microsegundos/cm-1) y por el tiempo total que necesita para recorrer la distancia de ida y regreso
4. Para ecografía en tiempo real se utiliza frecuencias hasta de 2000 Hz con pulsos de alta calidad y de frecuencia uniforme (Goddard 2000).
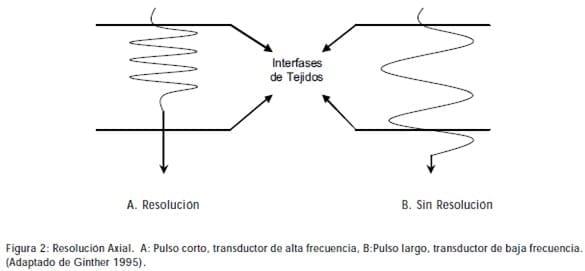
Resolución axial : Capacidad del sistema para diferenciar dos estructuras a lo largo de la longitud de la onda. Mejora en pulsos de corta duración. El número de ciclos por pulso los fija el fabricante, por lo tanto, para mejorarla, se aumenta la frecuencia (Goddard 2000) (Figura 2).
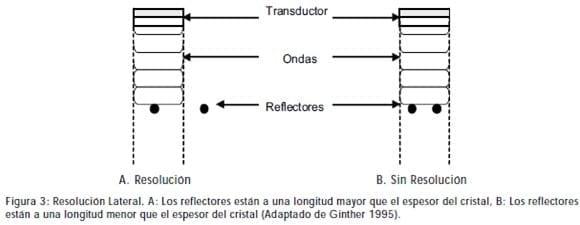
Resolución lateral: Capacidad para diferenciar dos estructuras situadas perpendicularmente. Está relacionada con el tamaño de los cristales del transductor y con la frecuencia de emisión (Figura 3). Mejora cuando aumenta la frecuencia, pero se reduce la ganancia (Goddard 2000).
Mecanismo de histéresis : Las ondas ultrasónicas son absorbidas por algunos tejidos. Las fuerzas de compresión y relajación de la onda no se transmite con una eficiencia total debido a los efectos de fricción con los tejidos, y por lo tanto, la onda se desfasa (Goddard 2000). Este desfase ocurre entre los dos fenómenos que deberían darse al mismo tiempo: el eco de la onda y su interpretación como imagen.
Atenuacióngeométrica : Cuando la onda se propaga más allá de su longitud focal, se produce divergencia de la onda, perdiéndose intensidad (Goddard 2000).
La señal reflejada es interpretada por el aparato como variaciones en el registro de brillos en el tubo de rayos catódicos en un sistema modo B, o como la variación en la amplitud del eje X de un osciloscopio en el modo A. En algunos sistemas Doopler hay una salidas de audiofrecuencia (Goddard 2000). En el sistema de modo B esos puntos serán tanto más brillantes cuanto mayor sea la reflexión por parte del tejido, y así, cada tejido tiene su estructura más o menos ecogénica, denominándose hiper, hipo o anecogénica, según la cantidad ecos que reflejan. Los ecos se presentan en puntos en una escala de grises, desde el negro (anecogénico) como los líquidos limpios y gases, hasta el blanco (hiperecogénico) como la estructura compacta de los huesos que refleja todos los ecos y pueden dar imágenes «en espejo» y otros «artefactos» -imágenes que no son reales- (Ballenda 2003). La imagen percibida en realidad es la fijación de varias imágenes por segundo, generalmente 60 o menos por segundo.
La fuerza de la onda reflejada depende de las diferencias en impedancia acústica de los tejidos, el ángulo de penetración y la distancia recorrida. Si la onda atravesara una estructura homogénea, no habría reflexión, pero, como ocurre en el hígado (que es un órgano relativamente homogéneo), existen pequeñas estructuras internas (canalículos biliares, sinusoides, etc) que producen una imagen con un brillo semi-intenso de sus serosas y pequeñas áreas anecogénicas por sus espacios intraluminales, lo que permite identificar y diferenciar al órgano (Ballenda 2003).
En las distintas capas (interfases) de los tejidos puede haber un marcado gradiente de densidad por la gran diferencia en impedancia acústica, por ejemplo la interfase tejido blando / aire. Aunque los tejidos que poseen impedancia acústica similar son difíciles de diferenciar en una interfase, las superficies serosas proporcionan, a menudo, fuertes líneas de demarcación brillantes. Estas superficies normales y acústicamente reflectantes de las ondas de ultrasonidos se denominan «reflectores especulares». Con respecto al ángulo de penetración de la onda frente a un tejido, mientras más desviado, menos proporción de la misma será reflejada hacia el transductor (Goddard 2000).
TRANSDUCTORES O SONDAS
TRANSDUCTORES O SONDAS
Su núcleo funcional se encuentra en el material piezoeléctrico que fabrica los impulsos. Generalmente se usan los cristales artificiales de zirconato-titanatode plomo (PZT) por ser muy precisos. La frecuencia de resonancia del transductor es fijada por el fabricante y se relaciona con el grosor (normalmente inferior a 1 mm). Los transductores lineales tienen entre 64 – 256 cristales alineados a lo largo del eje mayor de la sonda. Hay una capa amortiguante detrás de los cristales (resina epóxica con polvo de tungsteno y caucho) que reduce la duración del pulso y mejora la resolución axial (Goddard 2000).
Los transductores de ordenamiento lineal necesitan una mayor área de contacto con la superficie, mientras que los sectoriales (de forma convexa) sólo requieren un área pequeña y facilitan la visualización de estructuras inaccesibles mediante los lineales (Ej., visualización intercostal). Un transductor lineal tiene los cristales ubicados en línea recta, produciendo una imagen rectangular en la pantalla del monitor. Un transductor sectorial produce una imagen triangular (Ginther et al. 1989). Los transductores Doppler de pulso sólo poseen un cristal, y los Doppler de onda continua tienen dos; uno de transmisión y otro de recepción (Goddard 2000)
Las sondas tienen un recubrimiento lacrado para prevenir la entrada de humedad y evitar accidentes de tipo eléctrico (Goddard 2000). Los transductores son costosos y muy frágiles. Son rígidos, y por lo tanto, no se acomodan a la forma del animal, por lo que en algunas aplicaciones se utilizan almohadillas (guías súper-blandas o stand-off), las cuales ayudan a la acústica y están disponibles en diferentes tamaños, tipos de transductores y especie animal (Perkins 2000).
El aire y la grasa superficial dificultan la transmisión de los ultrasonidos, por eso es necesario eliminar los pelos de la piel y desengrasar con alcohol en el sitio que va a recorrer el transductor, además, es necesario utilizar un agente de acoplamiento que actúe como puente entre el transductor y el paciente, generalmente sustancias gelatinosas. Este gel debe de tener una impedancia acústica adecuada para reducir los artefactos de contacto y estar exentos de materiales capaces de dañar o irritar al paciente durante la exposición, incluso, pueden contener agentes antimicrobianos (Kahn y Leidl 1989).
Dentro de los transductores que se utilizan en medicina veterinaria se encuentran los de 3.5, 5 y 7.5 MHz. Para el examen de cuerpos lúteos, folículos y embriones por ejemplo, es conveniente utilizar los de 7.5 MHz, ya que la profundidad de penetración es aproximadamente de 5 cm. Por lo tanto, la escogencia de los transductores está relacionada con el tipo de examen que se desee adelantar porque ellos tiene diferentes profundidades de penetración. Los transductores de 5 y 3.5 MHz penetran 10 y 15 cm. No obstante, se debe tener en cuenta que a mayor frecuencia mejor imagen, pero menor penetración También existen ecógrafos que pueden combinar los transductores mediante la utilización de comandos específicos en el teclado (Kahn y Leidl 1989).
El examen transvaginal también se utiliza en medicina veterinaria. Para este examen se requiere que el tracto reproductivo sea aproximado transrectalmente contra la pared de la vagina anterior, para luego ubicar el transductor por «detrás» del cervix en el fondo de la vagina (Pieterse 1989, Pieterse 1990). No obstante, este examen requiere de equipo especial y exige además una buena higiene cuando se introducen artefactos en la vagina. Tal vez estas exigencias y requerimientos permitan que el examen transrectal goce de mayor aceptación en medicina veterinaria (Pieterse 1990, Revah y Butler 1996).
SEGURIDAD Y CUIDADOS DE MANEJO
Se cree que la exposición a los ultrasonidos no genera ningún tipo de daño conocido en los tejidos vivos, sin embargo, lo ideal es exponer al paciente el menor tiempo posible. Hay que tener en cuenta que se debe ser hábil con el manejo del equipo y conocer muy bien la anatomía del paciente para realizar un diagnóstico apropiado y de forma rápida (Goddard 2000).
Los ultrasonidos pueden producir calor en los tejidos y esto se aplica en terapéutica para resolver problemas de tipo músculo esquelético generalmente, sin embargo, esta propiedad de generar calor puede ser potencialmente peligrosa para el organismo. El grado de calentamiento depende de la intensidad y duración de la aplicación, la vía de conducción del calor lejos de la zona donde se aplica (Ej., la circulación sanguínea puede disipar el calor). Los tejidos de pobre riego sanguíneo, y los huesos por su alta atenuación de las ondas, tienden a calentarse, sin embargo, intentan equilibrar su temperatura manteniendo su homeóstasis. Puede ocurrir cavitación en los tejidos expuestos cuando burbujas de gas se expanden y contraen por la rápida difusión de gas desde estructuras de los alrededores (Goddard 2000).
Cuando las imágenes se estudian congeladas, es importante alejar la sonda del paciente y del técnico (Goddard 2000). La seguridad eléctrica del equipo es, en principio, responsabilidad del fabricante. Sin embargo, es necesario revisar rutinariamente las conexiones eléctricas y el estado de los cables buscando zonas desgastadas o agrietadas. Se deben realizar todas las conexiones con el equipo apagado, incluso cuando se desee cambiar un transductor (Ballenda 2003) .
A veces, en la práctica veterinaria es necesario desplazarse con el equipo a sitios donde el acceso a energía es difícil, lo que hay que evitar al utilizar extensiones de cables con conexiones inapropiados que puedan entrar en contacto con la humedad, y con las irregularidades en el flujo de corriente. La mayoría de los aparatos van dotados de un polo a tierra suplementario (Goddard 2000).
En el caso de los estudios transrectales, se recomienda proteger la sonda con un guante descartable largo, como los de palpación rectal, previa aplicación de gel sobre la zona de los cristales.
Si bien el transductor transrectal está diseñado para utilizarse sin protección alguna, se recomienda esta precaución, en virtud de una mejor preservación de la parte más delicada del equipo, y como forma de no «contaminar» el transductor, y poder así vehiculizar algún microorganismo a otras zonas de trabajo (Ballenda 2003)
Durante la tarea, es muy común que se ensucie el aparato, y al finalizar, se debe limpiar con un trapo o paño limpio y húmedo, y sólo se debe lavar con agua la sonda desde el transductor hasta el remoto. Es recomendable aplicar siliconas periódicamente sobre el equipo, ya que evitan que el polvo y la suciedad se adhieran a la carcasa, siendo muy fácil de limpiar posteriormente. Igualmente, se sugiere que una o dos veces al año, sea revisado por los técnicos de la empresa manufacturadora, para una limpieza completa de todo el interior (Ballenda 2003)
APLICACIONES EN PRODUCCIÓN Y REPRODUCCIÓN ANIMAL
Algunos de los usos, en especial de diagnóstico, investigación y manejo reproductivo son: caracterización de ondas foliculares, diagnóstico de patologías del aparato reproductor, diagnóstico temprano de gestación, determinación precoz del sexo fetal, punción y aspiración folicular para colectar oocitos (Palmer y Driancourt 1980, Ginther et al. 1989, Pieterse et al. 1991; Farin et al. 1992, Rajamahendran et al. 1994, Boyd et al. 1988, Boyd et al. 1990) estudio de la viabilidad embrionaria, determinación de la edad de gestación, evaluación ginecológica de donantes y receptoras de embriones, determinación del momento de inicio de superovulación de donantes, estimación de la respuesta superovulatoria, determinación del momento de aplicación de agentes luteolíticos para sincronizar celos (medición de cuerpo lúteo), evaluación de la respuesta del ovario a otros sistemas de sincronización de celo, determinación del momento y/o tasa de ovulación para servicio (aplicado especialmente en yeguas y cerdas), determinación de gestaciones múltiples (aplicado especialmente a ovejas, cabras, cerdas, perras), determinación precoz de mellizos para dejar uno (aplicado especialmente en yeguas, vacas), aplicación en los machos, para estudio de glándulas accesorias, testículos y epidídimo (Ballenda 2003), medición de la grasa y músculo dorsal para clasificar canales (Perkins 2000), evaluación del grado de fibrosis en la glándula mamaria, evaluación de tendones y tejidos blandos superficiales especialmente en las extremidades.
BIBLIOGRAFÍA
1. Bellenda Omar G. La ecografía aplicada a la reproducción en especies de interés productivo, Montevideo – Uruguay. 2003. http:// www.ecografiavet.com.
2. Boyd JS, Omran SN, Ayliffe TR. Use of a high frequency transducer with real time B-mode ultrasound scanning to identify early pregnaney in cows. Vet Rec 1988; 121:8-11.
3. Boyd JS, Omran SN, Ayliffe TR. Evaluation of real time B mode ultrasound scaning for detecting early pregnancy in cows. Vet Rec 1990; 127:350- 352.
4. Chaffaux S et al. Evolution de l´Image Échographique de produit de conception chez la vache. Bull Acad Vet Fr. 1982; 55:213-221.
5. Ginther OJ. Ultrasonic imaging and animal reproduction: Fundamentals, Book 1. Ginther Ed. Madison, Wisconsin, 1995.
6. Ginther OJ, Knopf L, Kastelic JP. Temporal associations among ovarian events in cattle during estrous cyeles with two and three follicular waves. J Reprod Fert 1989; 87:223 230.
7. Goddard PJ. Principios Generales. Ecografía Veterinaria. Ed. Acribia 2000.
8. Kahn W. Sonographic imaging of the bovine fetus. Theriogenology. 1990; 3:385-396.
9. Kahn W and Leidl, W. Ultrasonic characteristics of pathological condictions of the bovine uterus and ovaries. In: Diagnostic Ultrasound and Animal Reproduction (Taveme MAM and Willemse AH, Eds). Kluwer Acadernic Publishers, Dordrecht. 1989; 53-65.
10. Kassam A. Et al. Clinical and endocrine responses to embrionic and fetal death induced by manual rupture of the amniotic vesicle during early pregnancy in cows. JAVMA. 1987; 191:417-420.
11. Palmer E. and Driancourt MA. Use of ultrasonic echography in equine gynecology. Theriogenology. 1980; 13:203-216.
12. Perkins T. Uso del ultrasonido en la clasificación de la canal y evaluación reproductiva. Primer congreso nacional de la raza cebú. Revista El Cebú, 2000.
13. Pierson RA. and Ginther, O.J. Ultrasonography of the bovine ovary. Theriogenology. 1984; 21:495-504.
14. Pieterse MC. Ultrasonic characteristes of physiological structures on bovine ovaries. In: Diagnostic Ultrasound and Animal Reproduction (Taverne MAM and Willernse AH, Eds). Kluwer Academic Plublishers, Dordrecht. 1989; 37-51.
15. Pieterse MC. et al. Detection of corpora lutea and follicles in cow: a comparison berween transvaginal ultrasonography and rectal palpation. Vet Rec. 1990; 126:522-544.
16. Pieterse MC. et al. Characteristcs of bovine estrous cycles during repeated transvaginal ultrasound guided puncturing of follicles for ovum pick up. Theriogenology 1991; 35:401-413.
17. Pieterse MC. et al. Clínical use of ultrasound in bovine reproduction. PhD dissertation, State University, Veterinary Faculty, Utrecht, The Netherlands, 1990.
18. Reinders JMC. and Van Giessen, R.C. The accuracy and application of foetal sex determination by ultrasonography in cattle. Proc.9 th Scientific Meeting AETE, Lyon 1993; 266.
19. Revah L. and Butler, W.R. Premature maturation of bovine oocytes obtaines from prolonged dominant follicles. J Reprod Fertil 1996; 106:39-43.
20. Taverne MAM, and Willemse AH. Diagnostic Ultrasound and Animal Reproduction, Ed. Kluwer Acadenic Publishers, Dordrecht, 1989.
2. Boyd JS, Omran SN, Ayliffe TR. Use of a high frequency transducer with real time B-mode ultrasound scanning to identify early pregnaney in cows. Vet Rec 1988; 121:8-11.
3. Boyd JS, Omran SN, Ayliffe TR. Evaluation of real time B mode ultrasound scaning for detecting early pregnancy in cows. Vet Rec 1990; 127:350- 352.
4. Chaffaux S et al. Evolution de l´Image Échographique de produit de conception chez la vache. Bull Acad Vet Fr. 1982; 55:213-221.
5. Ginther OJ. Ultrasonic imaging and animal reproduction: Fundamentals, Book 1. Ginther Ed. Madison, Wisconsin, 1995.
6. Ginther OJ, Knopf L, Kastelic JP. Temporal associations among ovarian events in cattle during estrous cyeles with two and three follicular waves. J Reprod Fert 1989; 87:223 230.
7. Goddard PJ. Principios Generales. Ecografía Veterinaria. Ed. Acribia 2000.
8. Kahn W. Sonographic imaging of the bovine fetus. Theriogenology. 1990; 3:385-396.
9. Kahn W and Leidl, W. Ultrasonic characteristics of pathological condictions of the bovine uterus and ovaries. In: Diagnostic Ultrasound and Animal Reproduction (Taveme MAM and Willemse AH, Eds). Kluwer Acadernic Publishers, Dordrecht. 1989; 53-65.
10. Kassam A. Et al. Clinical and endocrine responses to embrionic and fetal death induced by manual rupture of the amniotic vesicle during early pregnancy in cows. JAVMA. 1987; 191:417-420.
11. Palmer E. and Driancourt MA. Use of ultrasonic echography in equine gynecology. Theriogenology. 1980; 13:203-216.
12. Perkins T. Uso del ultrasonido en la clasificación de la canal y evaluación reproductiva. Primer congreso nacional de la raza cebú. Revista El Cebú, 2000.
13. Pierson RA. and Ginther, O.J. Ultrasonography of the bovine ovary. Theriogenology. 1984; 21:495-504.
14. Pieterse MC. Ultrasonic characteristes of physiological structures on bovine ovaries. In: Diagnostic Ultrasound and Animal Reproduction (Taverne MAM and Willernse AH, Eds). Kluwer Academic Plublishers, Dordrecht. 1989; 37-51.
15. Pieterse MC. et al. Detection of corpora lutea and follicles in cow: a comparison berween transvaginal ultrasonography and rectal palpation. Vet Rec. 1990; 126:522-544.
16. Pieterse MC. et al. Characteristcs of bovine estrous cycles during repeated transvaginal ultrasound guided puncturing of follicles for ovum pick up. Theriogenology 1991; 35:401-413.
17. Pieterse MC. et al. Clínical use of ultrasound in bovine reproduction. PhD dissertation, State University, Veterinary Faculty, Utrecht, The Netherlands, 1990.
18. Reinders JMC. and Van Giessen, R.C. The accuracy and application of foetal sex determination by ultrasonography in cattle. Proc.9 th Scientific Meeting AETE, Lyon 1993; 266.
19. Revah L. and Butler, W.R. Premature maturation of bovine oocytes obtaines from prolonged dominant follicles. J Reprod Fertil 1996; 106:39-43.
20. Taverne MAM, and Willemse AH. Diagnostic Ultrasound and Animal Reproduction, Ed. Kluwer Acadenic Publishers, Dordrecht, 1989.
*** El artículo fue originalmente publicado en MVZ-Córdoba 2003; 8:(2), 303-309.
Temas relacionados:
Autores:

Universidad de Antioquía (Colombia)
Recomendar
Comentar
Compartir

¿Quieres comentar sobre otro tema? Crea una nueva publicación para dialogar con expertos de la comunidad.
